Feedback Particle Filter with Mean-field Coupling
Tao Yang, Prashant G. Mehta, Sean P. Meyn
Abstract: A new formulation of the particle filter for nonlinear filtering is presented, based on concepts from optimal control, and from mean-field game theory. The feedback particle filter is based on a feedback control structure: The control is chosen as a solution of a certain variational problem, so that the posterior distribution of any particle matches as closely as possible the posterior distribution of the true state given the observations.
The feedback particle filter is shown to be consistent with the nonlinear filter: In the infinite-N limit, the empirical distribution of ensemble particles converges to the conditional distribution of the state given the observations.
Simulation results using FPF for the nonlinear oscillator perturbed by white noise, with partial nonlinear observations: The movie depicts comparison of the true state θ (red) and the conditional mean θ (green). The conditional mean is obtained using N=100 particles (magenta).
The introduction of control in the feedback particle filter has several advantages:
Variance reduction: The feedback can help reduce the high variance that is sometimes observed in the usual particle filter. Numerical results support this claim - See below for a comparison of the feedback particle filter and the bootstrap filter for the linear filtering problem.
Applications: Bayesian inference is an important paradigm used to model functions of certain neural circuits in brain. Compared to techniques that rely on importance sampling, a feedback particle filter may provide a more neuro-biologically plausible model to implement filtering and inference functions.
Acknowledgement: Financial support from the AFOSR grant FA9550-09-1-0190 is gratefully acknowledged.
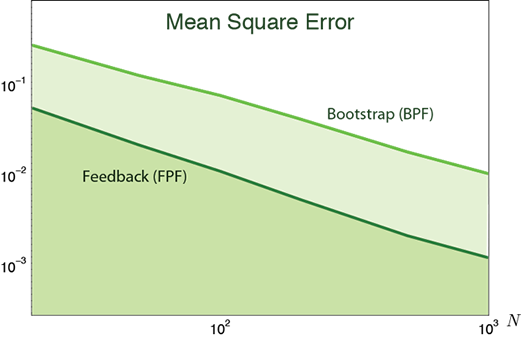
Mean square error obtained using the feedback particle introduced in this paper and the bootstrap filter
References
@inproceedings{yanmehmey11b,
Title = {Feedback Particle Filter with Mean-field Coupling},
Author = {T. Yang and P. G. Mehta and S. P. Meyn},
Booktitle = CDC2011,
Month = {Dec},
Year = {2011}}
@inproceedings{yanmehmey11,
Author = {T. Yang and P. G. Mehta and S. P. Meyn},
Booktitle = ACC2011,
Month = {June},
Title = {A Control-Oriented Approach to Particle Filtering},
Year = {2011}}
|
|
